图示结构,忽略各杆件的轴向变形,判断位移法计算时的基本未知量为()。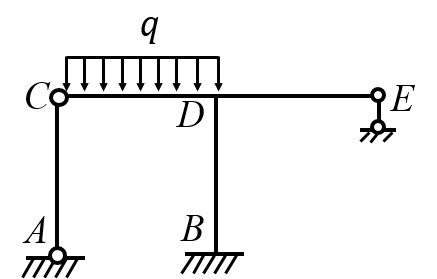
A: 结点D的转角;
B: 铰结点C的转角;
C: 支座A的转角。
D: 支座E的水平线位移;
A: 结点D的转角;
B: 铰结点C的转角;
C: 支座A的转角。
D: 支座E的水平线位移;


举一反三
- 图示结构,忽略各杆件的轴向变形,判断位移法计算时的基本未知量为()。[img=437x279]17d6092943d3cf1.png[/img] A: 结点D的转角; B: 铰结点C的转角; C: 支座A的转角。 D: 支座E的水平线位移;
- [img=437x279]17de8320f51a634.png[/img]图示结构,忽略各杆件的轴向变形,可作为位移法计算基本未知量的为( ) A: 结点D的转角 B: 支座E的转角 C: 铰结点C的转角 D: 支座A的转角
- 1803a40f09b10d8.png图示结构,忽略各杆件的轴向变形,可作为位移法计算基本未知量的为( ) A: 结点D的转角 B: 支座E的转角 C: 铰结点C的转角 D: 支座A的转角
- 图示结构,忽略各杆件的轴向变形。已知各杆件的长度均为l,刚度均为EI,受均布荷载作用,用位移法计算时的基本体系如图所示,求出位移法方程中的系数和自由项为()<img src="https://image.zhihuishu.com/zhs/doctrans/docx2html/202003/d7f9da9f3d7d4a1ca3aacc9d78b287bc.png" /> A: <img src="https://image.zhihuishu.com/zhs/doctrans/docx2html/202003/4e6dd0d1ad09433f951a2ff19b298211.png"/>; B: <img src="https://image.zhihuishu.com/zhs/doctrans/docx2html/202003/3b01d536637e445e841b61e5a9fa3506.png"/>。 C: <img src="https://image.zhihuishu.com/zhs/doctrans/docx2html/202003/0969ea96f00849a09cccad36566fbf50.png"/>; D: <img src="https://image.zhihuishu.com/zhs/doctrans/docx2html/202003/f03eca36624f4c51aff26a8015294edc.png"/>;
- 图示结构,忽略各杆件的轴向变形,用位移法求解时的基本未知量数目为()<img src="https://image.zhihuishu.com/zhs/doctrans/docx2html/202003/3626729217c040b2bf119cc1960edee8.png" > A: 4; B: 3; C: 5。 D: 2;